人脸识别驱动
介绍
人脸识别模块使用的是易胜公司提供的人脸识别模块。识别速度快,识别效率高。利用该模块,用户可以实现基本的用户注册、用户登录、照片上传以及数据下传的功能。以下为具体功能及使用方法的介绍。
使用方法
创建工程
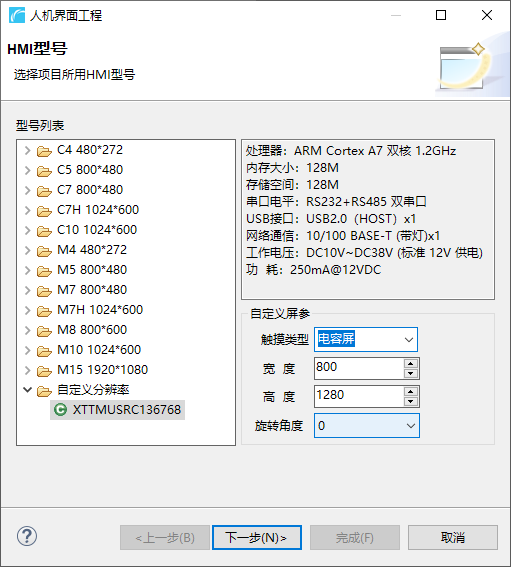
目前人脸识别模块只适用于自定义分辨率型号,大小为800*1280。选择完成后,选择 下一步 直至工程创建完成即可。
加入驱动
添加设备
右键 设备管理 进行添加,下拉框中选择 其他,进而选择 人脸识别模块
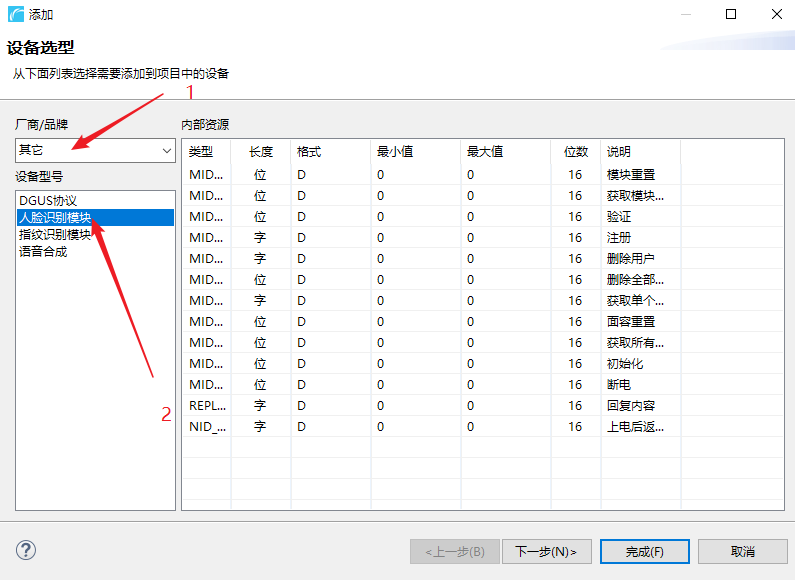
点击 下一步 直至模块选择完毕
HMI 设置
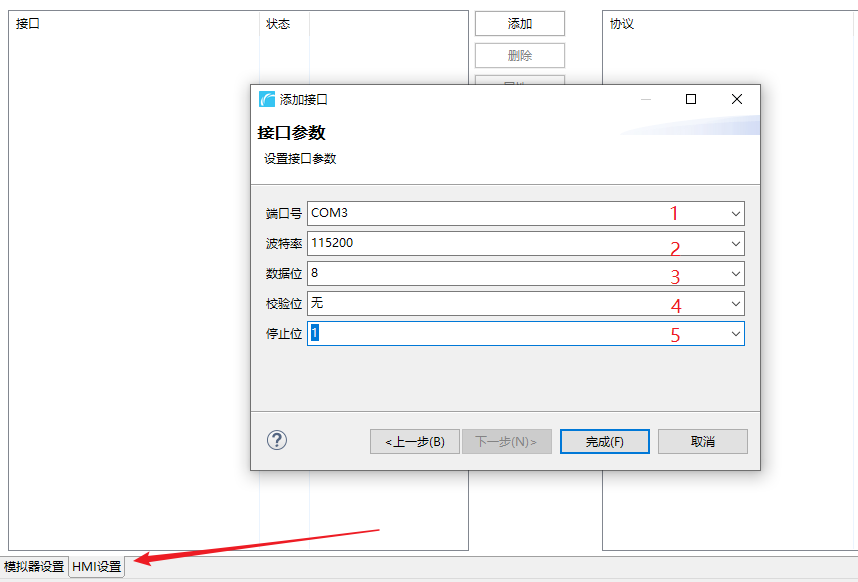
人脸识别模块在模拟器中是不生效的,因此我们只需要对 HMI 进行配置即可,按照如下内容对串口进行设置即可
至此,配置已全部设置完毕。下面将进行 API 讲解及使用方式。
类型介绍
总体介绍
使用类型
所有的使用方法如下所示
class EASENCODE{
public:
enum {
/** 停止并清除所有正在处理的消息,进入待机模式 */
MID_RESET = 0x10,
/** ping 模块并获取状态 */
MID_GETSTATUS = 0x11,
/** 验证摄像头前的人 */
MID_VERIFY = 0x12,
/** 拍照并保存 */
MID_SNAPIMAGE = 0x16,
/** 获取已保存图像的大小 */
MID_GETSAVEDIMAGE = 0x17,
/** 上传图像 */
MID_UPLOADIMAGE = 0x18,
/** 注册(可重复注册) */
MID_ENROLL_SINGLE = 0x1D,
/** 删除指定用户 */
MID_DELUSER = 0x20,
/** 删除所有注册用户 */
MID_DELALL = 0x21,
/** 获取用户信息 */
MID_GETUSERINFO = 0x22,
/** 重置人脸状态 */
MID_FACERESET = 0x23,
/** 获取所有用户 ID */
MID_GET_ALL_USERID = 0x24,
/** 初始化加密通信 */
MID_INIT_ENCRYPTION = 0x50,
/** 准备关机 */
MID_POWERDOWN = 0xED,
/** 注册(不允许重复注册) */
MID_ENROLL_ITG = 0x26,
/** 上传图片信息注册包及注册 */
MID_TRANS_FILE_PACKET = 0x90
};
};返回状态
获得的返回状态如下
class EASENREPLY{
public:
enum {
/**成功*/
MR_SUCCESS = 0,
/**模块拒绝该命令*/
MR_REJECTED = 1,
/**算法被中止*/
MR_ABORTED = 2,
/**摄像头打开失败*/
MR_FAILED4_CAMERA = 4,
/**未知错误*/
MR_FAILED4_UNKNOWNREASON = 5,
/**无效参数*/
MR_FAILED4_INVALIDPARAM = 6,
/**内存不足*/
MR_FAILED4_NOMEMORY = 7,
/**没有用户登记*/
MR_FAILED4_UNKNOWNUSER = 8,
/**超过最大用户数量*/
MR_FAILED4_MAXUSER = 9,
/**该人脸已被登记*/
MR_FAILED4_FACEENROLLED = 10,
/**活体检测失败*/
MR_FAILED4_LIVENESSCHECK = 12,
/**超过时间限制*/
MR_FAILED4_TIMEOUT = 13,
/**授权失败*/
MR_FAILED4_AUTHORIZATION = 14,
/**摄像头视场测试失败*/
MR_FAILED4_CAMERAFOV = 15,
/**摄像头质量测试失败*/
MR_FAILED4_CAMERAQUA = 16,
/**摄像头结构测试失败*/
MR_FAILED4_CAMERASTRU = 17,
/**启动超时*/
MR_FAILED4_BOOT_TIMEOUT = 18,
/**读取文件失败*/
MR_FAILED4_READ_FILE = 19,
/**写入文件失败*/
MR_FAILED4_WRITE_FILE = 20,
/**必须设置加密*/
MR_FAILED4_NO_ENCRYPT = 21
};
};重点介绍
MID_RESET
重置模块。将正在进行的流程进行中断,返回原始状态。传入的类型为bool,调用方法如下:
vm->setInt("模块重置",1,true);MID_GETSTATUS
获取当前的模块状态。传入的类型为bool,调用方法如下:
vm->setInt("模块获取",1,true);返回类型如下:
模组的状态包括:
0: MS_STANDBY(模组处于空闲状态,等待主控命令)
1: MS_BUSY(模组处于工作状态)
2: MS_ERROR(模组出错,不能正常工作)
3: MS_INVALID(模组未进行初始化)
4: MS_OTA(OTA 升级中)MID_VERIFY
对传入用户进行验证。返回用户唯一ID以及是否为管理员(1-管理员 0-非管理员)。传入的类型为bool,调用方法如下:
vm->setInt("验证",1,true);MID_ENROLL_SINGLE/MID_ENROLL_ITG
对用户进行注册(可重复注册)。传入的类型为string字符串,调用方法如下:
// 这样设置表示 当前注册的用户为zhangsan 给他设置为1-管理员 0-非管理员
vm->setChar("可重复注册","zhangsan1",true);
// 也可以这样设置 不加姓名 设置为1-管理员 0-非管理员
vm->setChar("可重复注册","1",true);MID_DELUSER
删除单个用户。 需要先获取用户 ID ,再进行删除。传入的类型为int,调用方法如下:
int userid = 1;//先获取当前用户id
vm->setInt("删除用户",userid,true);MID_DELALL
删除全部已注册用户。传入的类型为bool,调用方法如下:
vm->setInt("删除全部用户",1,true);MID_GETUSERINFO
获取用户信息。 需要先获取用户 ID ,再进行获取。传入的类型为int,调用方法如下:
int userid = 1;//先获取当前用户id
vm->setInt("获取用户信息",userid,true);MID_FACERESET
清除正在录入的状态。传入的类型为bool,调用方法如下:
vm->setInt("清除状态",1,true);MID_POWERDOWN
关机指令。 特别注意:在执行完所有操作之后 需要使用该命令进行关机,直接断电模块将会损坏使用寿命,降低使用年限 。传入的类型为bool,调用方法如下:
vm->setInt("关机",1,true);MID_SNAPIMAGE
截图指令,在识别过程中进行截图,图片为IR红外图片,注意:调用该命令后需要调用MID_GETSAVEDIMAGE才能完成截图。传入的类型为bool,调用方法如下:
vm->setInt("截图",1,true);MID_GETSAVEDIMAGE
保存图片。该指令可以和MID_SNAPIMAGE配合使用,也可以单独使用。配合使用的时候图片为IR黑白图片,单独使用时在光线充足时为RGB彩色图片,在光线不足时为IR黑白图片。在该指令执行成功后,会自动调用MID_UPLOADIMAGE,将图片保存在指定的路径下,为jpg格式图片。图片保存的过程中,需要进行等待(约 5s 内),等待期间不可进行其他操作。传入的类型为string字符串,为保存图片的路径。路径文件夹必须存在,调用方法如下:
string path = "/customer/prm/images/a.jpg";
vm->setChar("保存图片",path,true);MID_TRANS_FILE_PACKET
下传图片数据并注册用户(普通用户)。需要将jpg图片,通过易胜提供的工具转化为.bin的数据文件(可在技术支持群中向我们获取),传入.bin的数据文件,上传成功即注册成功,后续可以对其进行验证等其他操作。传入的类型为string字符串,为保存图片数据的路径。调用方法如下:
string path = "/customer/prm/images/a.jpg.bin";
vm->setChar("下传图片",path,true);至此,重点函数已全部介绍完毕。
类型统计
数据类型如下表所示:
| 名称 | 类型 |
|---|---|
| MID_RESET,MID_GETSTATUS,MID_VERIFY,MID_DELALL,MID_FACERESET,MID_POWERDOWN | bool |
| MID_ENROLL_SINGLE,MID_ENROLL_ITG,MID_GETSAVEDIMAGE,MID_TRANS_FILE_PACKET | 字符串 |
| MID_GETUSERINFO,MID_DELUSER | int |
返回值
本驱动封装了两种返回值,一个是NID_READY1,表示是在模块上电时的返回。一个是REPLY_STATUS,就是各种指令返回的组合值,下面是具体介绍:
NID_READY1
根据人脸识别文档指示
在上位机处于休眠模式前,请将串口两个引脚模式配置成输出低电平模式。
因此,我们需要在使用模块的时候 手动开启/关闭 gpio ,在使用页面onLoad函数中打开 gpio,在页面析构中关闭 gpio。
//开启gpio
void Frm05::onLoad() {
GPIO::setup(14);
string s = "out";
GPIO::setDirection(14, s);
GPIO::setValue(14, 1);
}
// 关闭gpio
Frm05::~Frm05() {
GPIO::setup(14);
string s = "out";
GPIO::setDirection(14, s);
GPIO::setValue(14, 0);
}在上电时,模块会发送上电指令。我们只需要直接获取指令结果,从而获取模块是否上电成功的状态。
int r;
vm->getInt("注册标志", r,true);上电成功后,即可进行接下来的操作。
REPLY_STATUS
REPLY_STATUS 分为三个组成部分。我们将通过以下代码对此进行讲解
/**
* getStatus 0 上电时标准置零状态 不代表任何模式 uint8_t类型
高24位
* 0x10 MID_RESET
* 0x11 MID_GETSTATUS
* 0x12 MID_VERIFY
* 0x1D MID_ENROLL_SINGLE
* 0x20 MID_DELUSER
* 0x21 MID_DELALL
* 0x22 MID_GETUSERINFO
* 0x23 MID_FACERESET
* 0xED MID_POWERDOWN ...
*
* dSignal 在MID_VERIFY MID_GETUSERINFO 为是否为管理员用户 检测成功的管理员用户是0x00(否) 0x01(是) 失败的是0x09
* 其他的情况 如果是0x00 表示成功 其他的参数可以对应返回的各类参数进行判断 uint8_t类型 高16位
*
* other 在MID_VERIFY MID_ENROLL_SINGLE MID_GETUSERINFO为用户id 其他的作为保留参数 默认为0 uint16_t类型 低16位
*/
long long reply;
vm->getLong("返回内容",reply);
int getStatus = (reply >> 24) & 0xFF;
printf("getStatus=======%02x\n",getStatus);
int dSignal = (reply >> 16) & 0xFF;
printf("dSignal=======%02x\n",dSignal);
int other = reply & 0xFFFF;
printf("other=======%02x\n",other);对于以上代码,有如下总结:
-
getStatus 表示为 原指令码。
-
MID_RESET、MID_DELUSER、MID_DELALL、MID_FACERESET、MID_POWERDOWN、MID_SNAPIMAGE、MID_UPLOADIMAGE。dSignal 仅表示 为指令 返回的状态 ,other 仅为预留位,不做任何值。
-
MID_UPLOADIMAGE 的 dSignal 为 0x00 时表示 图片下载成功,0x01 为图片下载失败(下载到本地),other 为预留位。
-
MID_GETSTATUS 的 dSignal 为 模块状态 ,执行失败时返回固定值 0x09,other 为预留位。
-
MID_VERIFY/MID_GETUSERINFO 的 dSignal 为 是否为管理员(1 为管理员,0 为非管理员) 。如果执行失败返回固定 0x09。other 为获取的 用户 ID。
-
MID_ENROLL_SINGLE/MID_ENROLL_ITG 的 other 为获取的 用户 ID,dSignal 仅表示 为指令 返回的状态。
-
MID_GET_ALL_USERID/MID_TRANS_FILE_PACKET 的 other 为获取的 用户个数 ,当返回结果为失败时,返回的用户个数固定为 0xFFFF,dSignal 仅表示 为指令 返回的状态。
注意
如果需要猫眼画面实时显示,需要用到 ApusIDE 提供的视频控件,需要进行手写配置部分参数,可以参考如下代码:
void Frm05::wMTimer1_timer_cb(uint16_t code, LvEvent e) {
if(eShowed)
return;
else{
#ifdef __arm__
if(stt::util::FileUtil::fileExists("/dev/video0")){
wMVideo1 = new STTFFmpeg(p_rt, this, "wMVideo1");
wMVideo1->enHardDecode = false;
wMVideo1->setRotate(0);
wMVideo1->setMainArg(176, 130, 480, 640, "/dev/video0");
wMVideo1->setRotateContent(270);
wMVideo1->play();
this->refresh();
eShowed = true;
}
#endif
}
}代码讲解
该代码为一段定时器代码,展示了开启摄像头 USB 猫眼画面的过程。
stt::util::FileUtil::fileExists("/dev/video0");“/dev/video0” 该路径为摄像头画面路径
wMVideo1 = new STTFFmpeg(p_rt, this, "wMVideo1");
wMVideo1->enHardDecode = false;
wMVideo1->setRotate(0);
wMVideo1->setMainArg(176, 130, 480, 640, "/dev/video0");
wMVideo1->setRotateContent(270);
wMVideo1->play();
this->refresh();- wMVideo1 为默认配置(需要在
.h文件中自行添加函数定义STTFFmpeg *wMVideo1),该摄像头模组支持的原生分辨率为640*480,也可以支持480*320,如果任意设置长宽会导致画面进行不同程度的拉伸。 - 如果希望修改画面位置,可以如下图添加,设置并记录播放器的位置。最后删除控件。
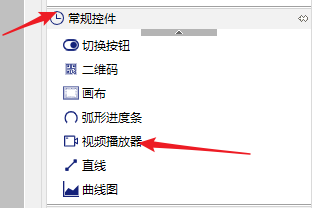
- 最后记得在 下载到程序 时要下载 视频播放器 控件中的有关于视频播放的库文件,如下图所示
该例程将会在技术支持时被提供。
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)