请输入
菜单
自定义Modbus
下载
使用场景
本工程适用于———现有的modbus驱动不能满足于当前需求,需要对某些变量进行单独处理的情况
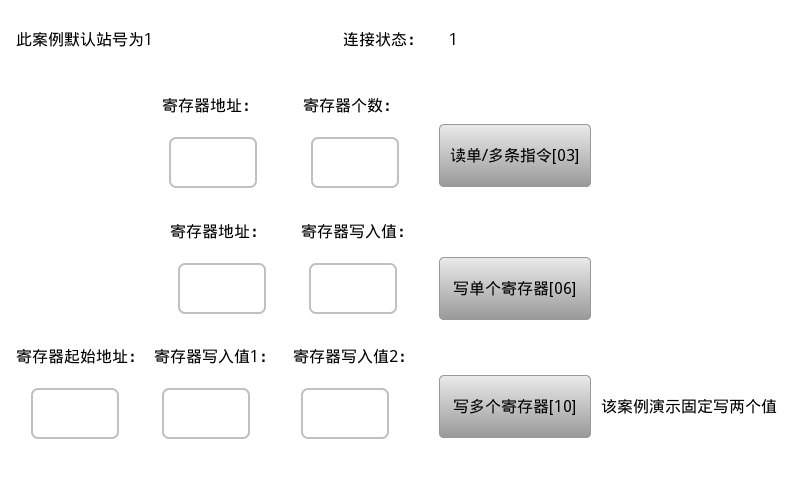
工程预览
使用指南
下载地址
https://help.simtutai.cn/docs/zi-ding-yi-Modbus-zhi-ling
对于modbus数据封装
c++
// MODBUS 06 - 写单个寄存器
bool HmiApp::modbus06_write(uint8_t slave_addr, uint16_t reg_addr, uint16_t value) {
vector<uint8_t> cmd;
bool r = ModbusUtils::build_modbus06_command(slave_addr, reg_addr, value, cmd);
if (!r) return r;
// 发送数据到串口
int rb = STTUartWrite(cmd.data(), cmd.size());
if (rb <= 0) return false;
return true;
}
bool HmiApp::modbus03_read(char * buff,uint8_t slave_addr, uint16_t reg_addr, uint16_t length) {
vector<uint8_t> cmd;
bool r = ModbusUtils::build_modbus03_command(slave_addr, reg_addr, length, cmd);
if (!r) return r;
// 打印参数
std::stringstream ss;
ss << std::hex << std::uppercase << std::setfill('0');
for(int i = 0; i < 8; i++) {
ss << std::setw(2) << static_cast<int>(cmd[i]) << " ";
}
std::cout << "Data: " << ss.str() << std::endl;
int ret = STTUartSendANDReadall(buff,length*2 + 3,200,cmd.data(),cmd.size());
// 打印参数
cout<<"ret = "<<ret<<endl;
printf("Buff(HEX): ");
for(int i = 0; i < ret; i++) {
printf("%02X ", (unsigned char)buff[i]);
}
printf("\n");
if (ret <= 0) return false;
return true;
}
// MODBUS 10 - 写多个寄存器
bool HmiApp::modbus10_write(uint8_t slave_addr, uint16_t start_addr, const std::vector<uint16_t>& values) {
if (values.empty()) return false;
vector<uint8_t> cmd;
bool r = ModbusUtils::build_modbus10_command(slave_addr, start_addr, values, cmd);
if (!r) return r;
// 发送数据到串口
// 这里调用实际的串口发送函数,使用UrHandle->uartID
int rb = STTUartWrite(cmd.data(), cmd.size());
if (rb <= 0) return false;
return true;
}对于发送和接收函数的封装
串口应选择模拟器/hmi中对应使用的modbus串口。案例工程模拟器和HMI均为COM1
c++
int HmiApp::STTUartWrite(unsigned char * bytes,int size){
UARTDriverBase * UrHandle = (UARTDriverBase *)dm->getDvcdriver("COM1");
if(UrHandle == nullptr)return 0;
std::lock_guard<std::mutex> lock(UrHandle->mtx);
return Util::uartWrite(UrHandle->uartID, bytes, 0, size);
}
int HmiApp::STTUartSendANDReadall(char * buff,uint8_t recvLen,uint16_t timeOut, unsigned char * bytes,int size){
UARTDriverBase * UrHandle = (UARTDriverBase *)dm->getDvcdriver("COM1");
if(UrHandle == nullptr)return 0;
int ReadSize = 0;
{
char buffer[256] = {0};
std::lock_guard<std::mutex> lock(UrHandle->mtx);
Util::uartReadAll(UrHandle->uartID,buffer,256,10);
if(size > 0){
Util::uartWrite(UrHandle->uartID, bytes, 0, size);
}
Util::sleepfor(10);
ReadSize = Util::uartReadAll(UrHandle->uartID,buff,recvLen,timeOut);
}
return ReadSize;
}触发调用
下面案例以06功能码为例
c++
void Frm01::wMButton2_clk_cb(uint16_t code, LvEvent e) {
/*wMButton2(功能键)的点击事件*/
// uint8_t slave_addr, uint16_t reg_addr, uint16_t value
uint8_t slave_addr = 0x01;
uint16_t reg_addr = static_cast<uint16_t>(StringUtil::safeStoi(wMTextNumber4->getText()));
uint16_t value = static_cast<uint16_t>(StringUtil::safeStoi(wMTextNumber5->getText()));
this->hmiApp->modbus06_write(slave_addr, reg_addr, value);
cout << "END" << endl;
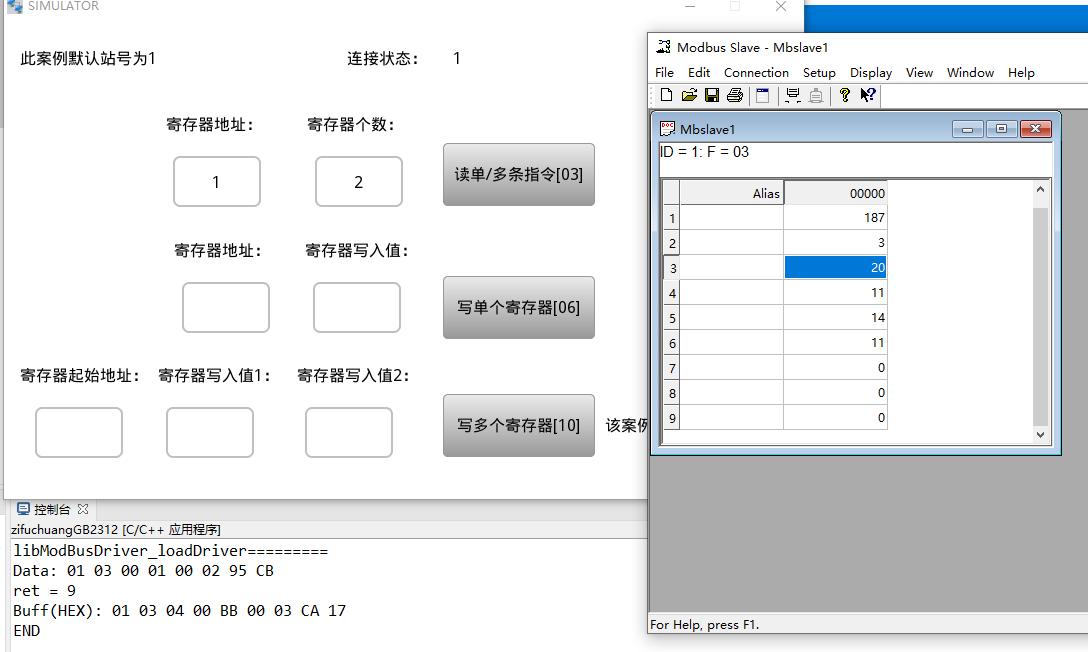
}运行情况
03 连读两个地址
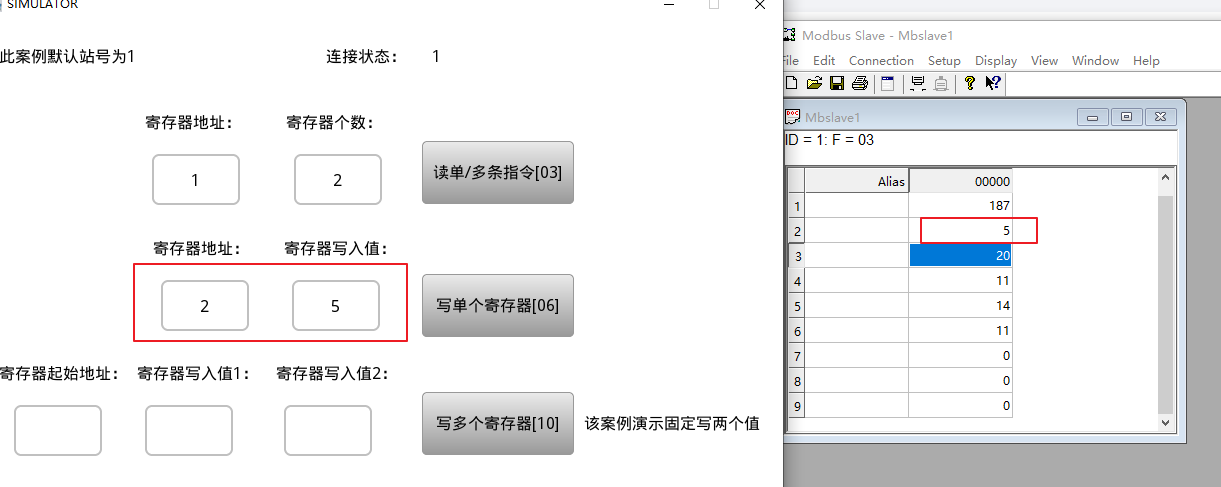
06 写单个地址
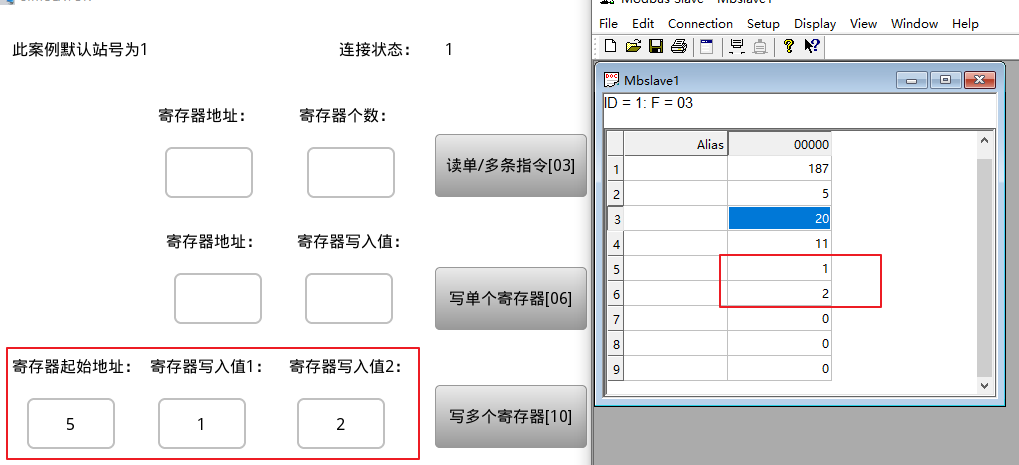
10 写连续多个地址
注意事项
头文件引入
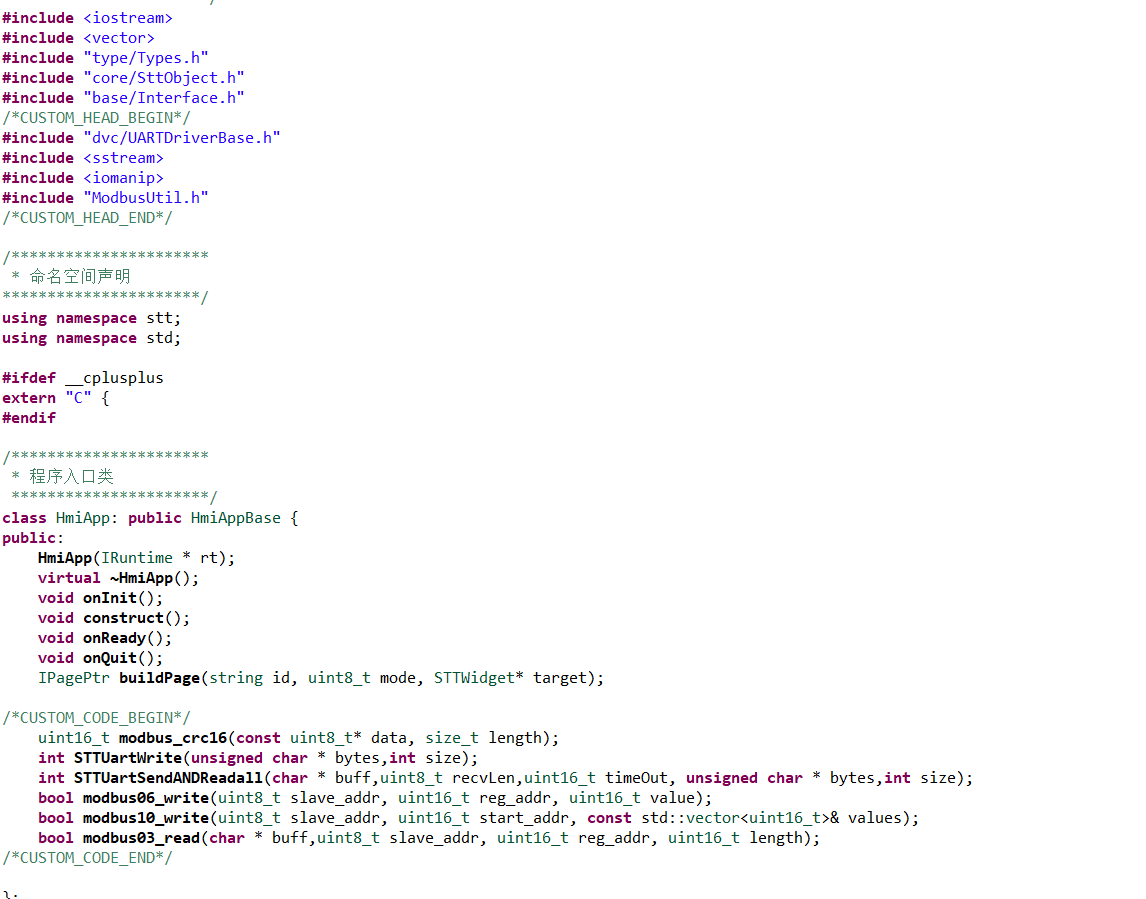
c++
/*CUSTOM_HEAD_BEGIN*/
#include "dvc/UARTDriverBase.h"
#include <sstream>
#include <iomanip>
#include "ModbusUtil.h"
/*CUSTOM_HEAD_END*/
/*CUSTOM_CODE_BEGIN*/
uint16_t modbus_crc16(const uint8_t* data, size_t length);
int STTUartWrite(unsigned char * bytes,int size);
int STTUartSendANDReadall(char * buff,uint8_t recvLen,uint16_t timeOut, unsigned char * bytes,int size);
bool modbus06_write(uint8_t slave_addr, uint16_t reg_addr, uint16_t value);
bool modbus10_write(uint8_t slave_addr, uint16_t start_addr, const std::vector<uint16_t>& values);
bool modbus03_read(char * buff,uint8_t slave_addr, uint16_t reg_addr, uint16_t length);
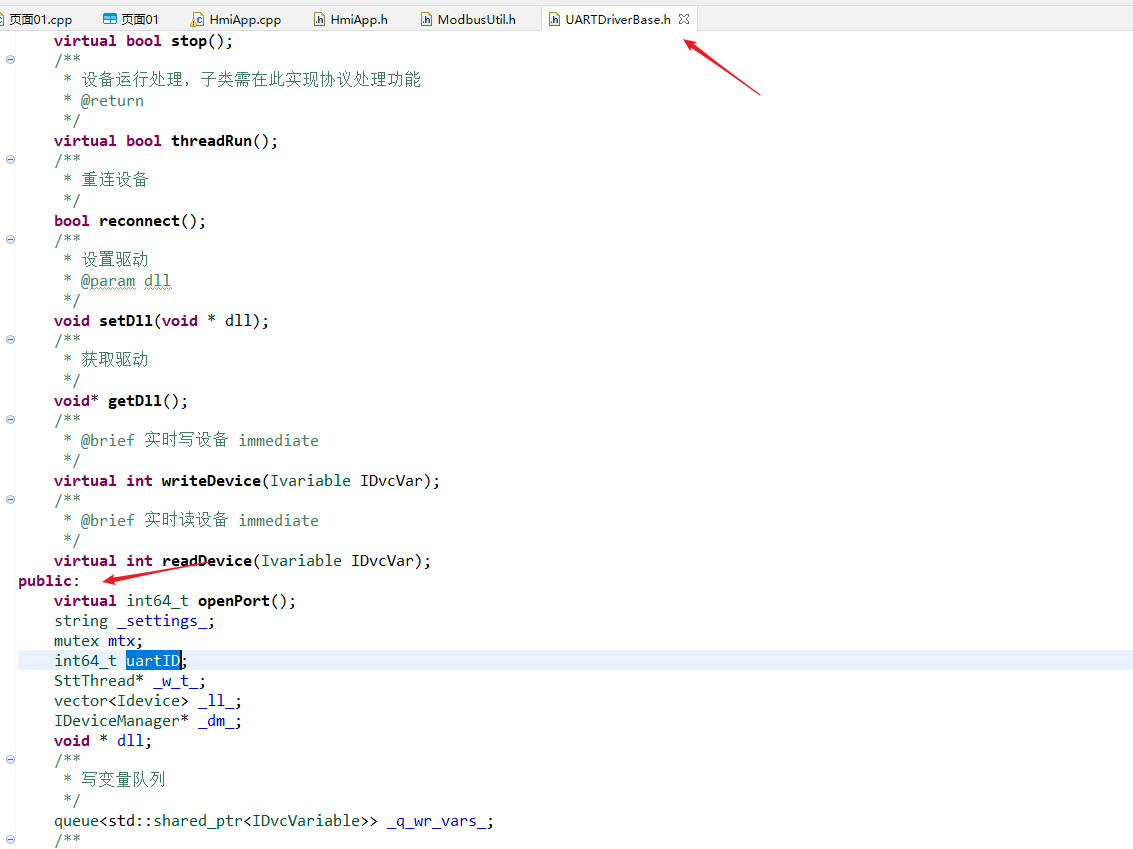
/*CUSTOM_CODE_END*/修改头文件 可以通过ctrl点击UrHandle进入修改
最近修改: 2025-10-28Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲